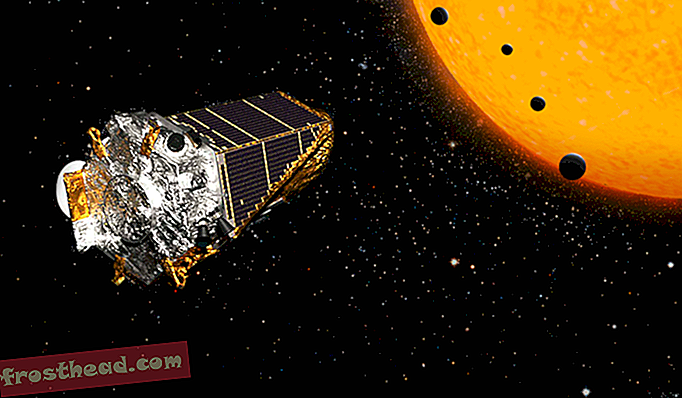
Az új robot egy egyenetlen felületen halad keresztül, egy zebrafarkú gyík mintájára. Kép jóvoltából Chen Li, Tingnan Zhang, Daniel Goldman
Egy olyan robot tervezése, amely könnyen mozoghat a laza terepen - mondjuk egy a Mars felszínét átjáró rovernek - egyedülálló mérnöki kihívást jelent: A kerekek általában belemerülnek a mérnökök által az ún. Talajhoz (homok, talaj, sár és fű keverékei). ).
Tekintettel a biológiailag ihlette innovációra a robotikában, a Georgia Tech kutatói csoportjának ötlege volt - alapozni a tervezést olyan sivatagi lényekre, mint például a zebrafarkú gyíkok, amelyek lassú, homokos felületen képesek átjutni lassulás nélkül. Erőfeszítéseik lehetővé tették számukra egy kicsi, hat lábú eszköz létrehozását, amelyet egy a Science című ma megjelent cikkben ismertetnek. Ez a szemcsés felületen olyan módon halad át, amely hülye módon emlékeztet egy hüllőre.
A kutatócsoport, Chen Li vezetésével, a különféle lények mozgásának tanulmányozását és a különféle típusú (számban, alakban és hosszúságban változó) lábak teljesítményének matematikai szimulációját készítette a különféle környezetekben. Reméljük, hogy kutatásaik ösztönözni fogják egy olyan terület kifejlesztését, amelyet „terradynamics” -nek neveznek - mivel az aerodinamika a szárnyas járművek levegőben történő teljesítésével foglalkozik, a területük meg fogja vizsgálni a lábú járművek mozgását a szemcsés felületeken.
A robot tervezéséhez ezeket a szimulációkat használták a lábak pontos hosszának, mozgási sebességének és erőszintjének meghatározására, amelyek az eszközöket egy laza felületen hajtanák meg anélkül, hogy túlságosan mélyen sülnének be. Ezután különféle lábatípusokat nyomtattak 3D nyomtatóval, és robotokat készítettek, hogy teszteljék őket a laboratóriumban.
Az egyik legérdekesebb megállapítás az, hogy ugyanazok a tervezési alapelvek vonatkoznak a különféle szemcsés felületek mozgására, beleértve a mákot, az üveggyöngyöt és a természetes homokot. Szimulációik és a valós kísérletek azt mutatták, hogy a C alakú lábak általában a legjobban működnek, de az íj alakú végtagok bármilyen típusa viszonylag jól működött, mert az eszköz súlyát eloszlatták a hosszú (bár keskeny) lábfelületekre, amikor a lábak jönnek lépéssel a talajjal érintkezni.

A kutatók azt találták, hogy a C alakú végtagok a legjobban működnek, ha gyorsan mozognak a szemcsés felületeken, mind a gyíkokban, mind a robotokban. A szaggatott, szilárd és pontozott ábrák C-ben és D-ben a korai, középső és késői lábak pozíciói egy lépés közben. A nyilak jelzik a mozgás irányát az egyes lábrészeknél. Kép keresztül Science / Li et. al.
Az ilyen típusú kutatások alkalmazásai széles körűek: A kutatók szerint ezt a robotot hasznos kutatási és mentési vagy felderítő eszközré lehetne fejleszteni, míg a terradinamika területéből származó alapelvek hasznosak lehetnek a szonda tervezésében más bolygók a jövőben. Segíthetnek a biológusoknak abban, hogy jobban megértsék, hogyan alakultak az élet formái a Földön, hogy átjuthassanak bolygónk felszínén.