Az emberek - különösen azok, akik a gyártásban dolgoznak - meglehetősen gyakori, hogy megkötnek egy csomót, lefűzik a burkolatot a kábelről, bedugnak egy csapot egy lyukba vagy használnak kézi szerszámot, például fúrót. Ezek egyszerű feladatoknak tűnhetnek, de valójában nagyon összetettek és rendkívül finom ujj- és kézmozgásokkal járnak.
kapcsolodo tartalom
- Hogyan hagyták el a robotok a laborot, és miként kezdték el segíteni az embereket?
Noha a robotok egyre inkább bekapcsolódnak a gyári munkákba és más típusú munkák széles skálájába - ideértve a szolgáltatóipart és az egészségügyet is -, ügyességük nem szinte olyan lenyűgöző. Mivel az emberek több mint 50 évvel ezelőtt először vezettek autógyárakba, robotokat építettünk, amelyek meglehetősen jól hegeszthetők, festhetők és összeszerelhetők. A mai legjobb robotkezelők ismerős tárgyakat vehetnek fel, és más helyre tudják vinni őket - például elraktározhatnak termékeket a raktárházakból és dobozokba tehetik őket.
A robotok azonban nem tudják a kéziszerszámot megfelelően orientálni - mondjuk, hogy egy Phillips-fejű csavarhúzót a csavar hornyaival bélelnek fel, vagy egy kalapáccsal a szöget célozzák meg. És minden bizonnyal nem tudnak két kezét együtt használni részletesen, például cserélni az elemeket távirányítón.
Az emberi kéz kiválóan teljesíti ezeket a feladatokat és még sok minden mást. Ahhoz, hogy közel álljon ahhoz a versenytárshoz, amire a kezünk könnyen képes, a robotkezetnek nagyobb rugalmasságra, megbízhatóságra és erőre van szüksége - és pontosabban kell érzékelniük, és még finomabb módon kell mozogniuk, mint most, és kitalálni, mit csinálnak. tartja, és hogyan lehet megfogni a legjobban. Ahhoz, hogy a robotok képesek legyenek az emberekkel együtt dolgozni, kitalálnunk kell, hogyan lehet robotokat készíteni, amelyek szó szerint kezet tudnak adni nekünk, amikor a saját kettőnk nem elég.
A Northeastern University kutatócsoportom éppen ezen dolgozik, különös tekintettel a humanoid robotokra, mint például a NASA Valkyrie, amelynek három ujja és hüvelykujja van mindkét kezén. Mindegyik számjegynek csukló-szerű illesztése van, és minden kéznek van egy csuklója, amely könnyen forog. A mozgások létrehozásán dolgozunk - a kar, a csukló, az ujj és a hüvelykujj kombinációi, amelyek együttesen hajtják végre a feladatot, mint például egy csavarkulcs körön mozgatása a csavar meghúzásához, vagy egy kocsi húzása egyik helyről a másikra.
 Ezeknek az ipari robotoknak több speciális eszköze van. Sok feladatát robot kezekkel lehetne megtenni? (Steve Jurvetson / flickr, CC BY)
Ezeknek az ipari robotoknak több speciális eszköze van. Sok feladatát robot kezekkel lehetne megtenni? (Steve Jurvetson / flickr, CC BY) A kéz fontossága
Ahelyett, hogy minden robotot egy egyedi feladatra szabott gépgé alakítanánk, meg kell terveznünk a többcélú robotokat, vagy akár olyan képessé váló gépeket, amelyeket általános célúnak nevezhetnénk - szinte minden feladathoz jó. Az ilyen típusú robotok sikerének kulcsa a kiváló kéz lesz.
Munkánk az adaptálható robotkezet új osztályának tervezésére összpontosít, amely képes a pontos finom mozgásokra és az önálló megragadásra. Amikor a robotok képesek szörfözni a körmökbe, cserélni az elemeket és más hasonló mozdulatokat végrehajtani - alapvető az emberek számára, de a robotok számára nagyon összetett -, jó úton vagyunk a robotikus kezekben az emberi jellegű ügyességhez.
Ennek a célnak az elérése magában foglalja olyan új minták feltalálását is, amelyek kemény és puha elemeket tartalmaznak - ahogyan az emberi csontok erőt adnak a tapadásnak, miközben a bőr eloszlatja a nyomást, hogy a borospohár ne összetörjön.
Gyorsabb fejlesztés és tesztelés
A modern technológiai fejlesztések megkönnyítik a fejlesztési folyamatot. A 3D nyomtatás segítségével nagyon gyorsan elkészíthetjük a prototípusokat. Még alacsony költségű eldobható elemeket is készíthetünk a mechanizmusok különféle elrendezéseinek kipróbálására, például két- vagy háromujjú megfogók az egyszerű helymeghatározási feladatokhoz vagy antropomorf robot kezek az érzékenyebb műveletekhez.
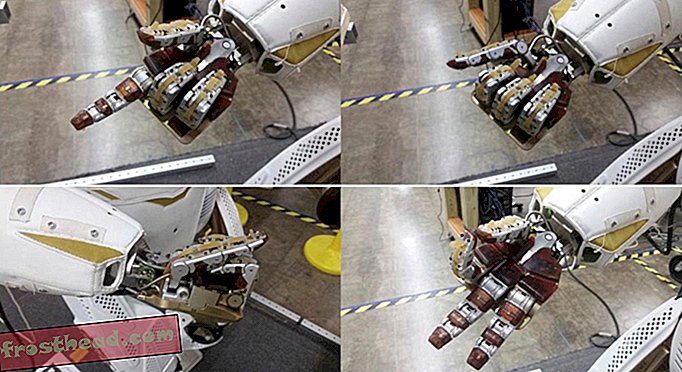 Különböző típusú kezek egy NASA Valkyrie roboton. (Northeastern University, CC BY-ND)
Különböző típusú kezek egy NASA Valkyrie roboton. (Northeastern University, CC BY-ND) Mivel az elektronikus kamerák és érzékelők egyre kisebbek lesznek, képesek vagyunk új módokon beépíteni őket. Például, ha a nyomásérzékelőket és a kamerákat robot kézbe helyezzük, akkor visszajelzést adhatnak a robotvezérlőnek (akár emberi, akár automatizált), ha a markolat biztonságos, vagy ha valami megcsúszik. Egy nap képesek lehetnek érzékelni, hogy a csúszó tárgy melyik irányba mozog, így a robot elkaphatja.
Ezek a képességek már látás és propriocepció révén az emberek második természetét képezik (az a képesség, hogy érzékeljük a testrészek relatív helyzetét anélkül, hogy rátekintenénk vagy gondolkodnánk). Ha sikerül elérni ezeket a robotokban, képesek lesznek megtenni például azt, hogy észleljék, ha a fogás túl erős-e, és túl keményen nyomja-e meg egy tárgyat.
Koordinált mozgások tervezése
Egy másik mérföldkő a robotok számára kidolgozott módszerek kidolgozása annak meghatározására, hogy milyen mozgásokat kell végrehajtaniuk valós időben, ideértve annak érzékelését, hogy mi történik a kezükben minden pillanatban. Ha egy robot kéz észleli a kezelt tárgyakban bekövetkező változásokat, vagy manipulálhat az elemekkel, miközben azokat megtartja, akkor ezek segíthetnek azokban a gyakori kézi feladatokban, mint a csomókötés és a huzalcsíkolás.
Két kézzel való együttmûködés még távolabbi a jövõben, bár jelentõs lendületet adna, különösen a gyártás számára. Nagyon nagy fejlesztés lenne egy olyan robot számára, amely két kezével képes fúrót működtetni vagy gépi alkatrészeket átadni egyik kezéből a másikba, lehetővé téve a gyárak számára, hogy még több lépést automatizálhassanak folyamataikban.
 Ez a jövő robotja? (NASA)
Ez a jövő robotja? (NASA) Mi, emberek, még nem fejlesztettük ki ezeket a rendszereket. Az emberi jellegű autonóm robotkészség elérésével a robotikutatók, technológusok és innovátorok a belátható jövőben elfoglaltak lesznek. Ez nem lassítja a gyártásban zajló robotikai forradalmat, mivel a jelenlegi folyamatoknak még mindig sok helyük van az automatizáláshoz a biztonság, a sebesség és a minőség javítása érdekében. De amint a robotokat még jobban fejlesztjük, képesek lesznek adni nekünk a kezünket.
Ezt a cikket eredetileg a The Conversation kiadta.
Taskin Padir, az északkeleti egyetem elektromos és számítógépes mérnöki egyetemi docens